
رباتیک اجتماعی علم بینرشتهای و ترکیبی از رشتههای مهندسی اعم از مکانیک، الکترونیک و کامپیوتر با رشتههای روانشناسیای است که نحوه انجام مداخلات و اثربخشی آنها را مطالعه میکنند.
زمینه رباتیک اجتماعی از سال ۹۳ آغاز شد. در زمان تاسیس این آزمایشگاه، هدف بهکارگیری فناوریهای رباتیک، واقعیت مجازی و سامانههای مبتنی بر اندروید برای کودکانی بود که نیازهای خاص دارند.
منظور از کودکان دارای نیازهای خاص، برای مثال کودکان طیف اوتیسم است که نمیتوانند برخی رفتارهای ساده اجتماعی را انجام داده یا با دیگران بهخوبی ارتباط برقرار کنند یا کودکان دارای سندروم دان که از بهره هوشی پایینتری برخوردارند، کودکانی که اختلال شنوایی داشته و یا ناشنوا هستند، کودکانی که اختلالات یادگیری داشته و یا حتی مشکلات جسمانی دارند، در این دسته قرار میگیرند.
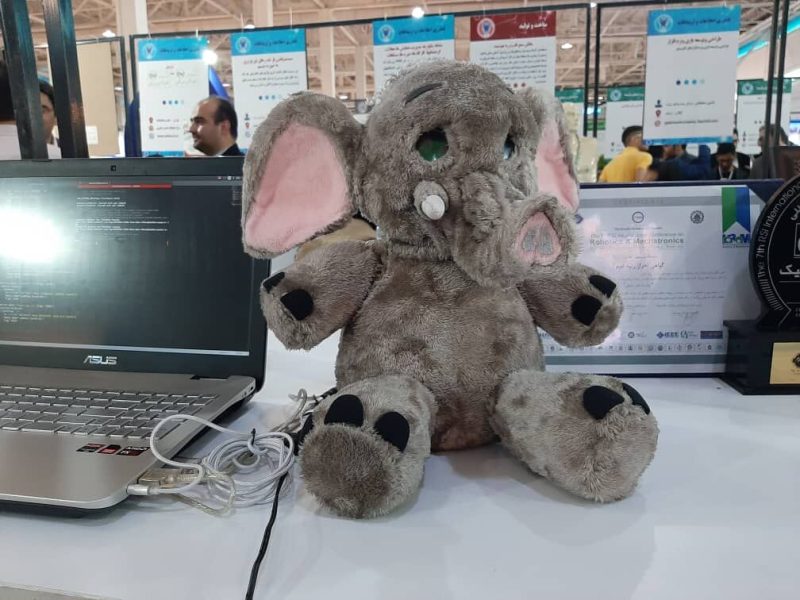
هرکدام از این بیماریها، نیازمند مداخله بالینی متفاوتی هستند و ربات یا فناوری واقعیت مجازی برای هرکدام یک شاخصه شناختی متمایز را مد نظر قرار میدهد. این شاخصهها برای کودکان اوتیسم، تقویت تعاملات اجتماعی، بهطور خاص تقلید و توجه اشتراکی و برای کودکان نارساخوان، آگاهی واجی است. در کودکان سرطانی، هدف، کاهش اضطراب و استرس است. در ابتدا ربات «نائو» و سپس ربات «آرش» و ربات «مایا» که به شکل فیل است، ساخته شدند تا به بیمارستانها برده شده و بازخورد کودکان به بیماریشان را برایشان توضیح دهند و با دوستی با آنها استرسشان را کاهش دهند.
در واقع میتوان گفت این نیازهای ویژه، احتیاج به پاسخهای ویژهای دارند که رباتیک اجتماعی میتواند یکی از این پاسخها باشد.
در همین راستا، محوریت فعالیت آزمایشگاه تعیین شد، استخراج پاسخهای ویژه فناورانه به کودکانی که نیازهای ویژه دارند. اما رباتیک اجتماعی چه مزایایی دارد که میتواند بهعنوان یک پاسخ برای این نیازها در نظر گرفته شود؟
برای مثال یک ربات را که نقش آموزش دارد، در نظر بگیرید. چند مشخصه میتواند این ربات را از یک معلم و سایر روشهای آموزشی متمایز کند. از آنجا که یک ربات، برنامهنویسی میشود، در تعداد دفعاتِ تعاملش با کودکان محدودیتی وجود ندارد و اینگونه نیست که توضیح یک مطلب برای دفعات متعدد از صبر و حوصله آن خارج باشد.
نکته دوم جذابیت سمعی و بصری رباتهاست. این رباتها با توجه به ملاکهای زیباییشناختی طراحی شده و با ترکیبشدن صوت و تصویر زیبا، گزینه جذابی برای تعامل با کودکان هستند.
نکته سوم هم این است که کودکان در سن خاصی فکر میکنند که این رباتها خودشان حرف می زنند و تمایل دارند تا با آنها دوست شوند و ارتباط برقرار کنند؛ بنابراین از رباتها حرفشنوی بهتری نیز دارند.
همه این عوامل باعث میشوند تا رباتیک اجتماعی بتواند شور و اشتیاق کافی برای فرایند آموزش در کودک بهوجود بیاورد و پاسخ مناسبی برای نیاز در این حوزه باشد.
روند کار در آزمایشگاه
روند کار در آزمایشگاه به این شکل است که ابتدا این نیازها تشخیص داده میشوند، سپس متناسب با آنها یا از رباتهایی که موجود هستند استفاده میشود یا از رباتهای تجاری موجود خریداریشده مانند ربات نائو که رباتی تجاری است، یا در نهایت رباتی با توجه به آن نیاز طراحی و ساخته میشود.
در سالهای ۹۳ و ۹۴ ، آزمایشگاه تنها رباتهای نائو را داشت و محققان با بهکارگیری رباتها، شاهد بازدهی آنها بودند و با مطالعه اثربخشی آنها این سوال مطرح شد که چرا ربات بومی ساخته نشود؟
بعد از اینکه اثربخشی ربات نائو بر روی کودکان سرطانی مشاهده شد و همینطور مقاله خانم دکتر عالمی – از پایه گذاران این آزمایشگاه – در سال ۲۰۱۴ در «کنفرانس ICSR» که معتبرترین کنفرانس رباتیک اجتماعی است، بهعنوان بهترین مقاله انتخاب شد، روند ساخت رباتها در آزمایشگاه رباتیک اجتماعی آغاز شد. پس از آن در این آزمایشگاه، نُه ربات ساخته شده است.
مراحل کار چگونه است؟
در آزمایشگاه رباتیک اجتماعی-شناختی، مراحل کار اینگونه است: ابتدا نیازهای خاص کودکان تشخیص داده شده، با توجه به آن نیازها، ربات طراحی و سپس ساخته میشود.
طراحی و ساخت، شامل مراحلی از جمله پیادهسازی، سرهمبندی، جانمایی و … است.
قدم بعدی، برنامهنویسی ربات با هدف کنترل آن و متناسب با کارکردهای تعریف شده است که در حال حاضر با پلتفرم (Ross (robot operating system که از بهروزترین پلتفرمهای کنترل ربات حتی در مقیاس صنعتی است، انجام میشود.
همه این مراحل، اعم از فرایند طراحی صنعتی، ساخت و توسعه نرمافزاری در همین آزمایشگاه انجام میگیرند. مرحله آخر نیز مطالعه بالینی و بررسی میزان اثربخشی است که با همکاری تیم روانشناسی انجام میشود.
طراحی مفهومی، طراحی صنعتی و طراحی جزییات از قسمتهای مهم در روند طراحیاند و به این گونه است که ساخت ربات از طراحی مفهومی آغاز شده و با طراحی جزییات ادامه مییابد.
در کنار این دو، همواره یک طراح صنعتی در روند طراحی نمونههای اولیه مشارکت داشته است، طراحی ظاهر یک ربات از جمله بدنه و انحناهای آن توسط طراح صنعتی انجام میشود و در ادامه، این طراحی در نرمافزارهایی مثل CATIA و SolidWorksپیادهسازی میشود.
در طراحی مفهومی، کلیت اجزای ربات مشخص میگردد؛ برای مثال تصمیمگیری میشود که واحد پردازنده مرکزی ربات چه باشد؟ mini PC، Raspberry یا … . متناسب با آن، محل قرارگیری باتری چگونه باشد؟
البته همه رباتها نیاز به باتری ندارند و برخی مانند انواع رومیزی آنها، مستقیماً به برق متصل میگردند. اما رباتهای متحرکی که راه میروند، به باتری احتیاج دارند که این موارد در طراحی مفهومی مشخص میشوند.
با مشخصشدن این کلیات، جانمایی تکتک المانهای ربات در بخش طراحی جزییات پیگیری میشود. در این قسمت، همه اجزا حتی سیمهای داخل ربات نیز طراحی و مدلسازی میشوند.
البته در روند طراحی، همواره تعدادی از قطعات و مکانیزمهای اولیه بهصورت جداگانه ساخته میشوند و مورد ارزیابی قرار میگیرند و بعد طراحی جزییات انجام میشود؛ یعنی بین طراحی مفهومی و طراحی نهایی تعدادی ساخت اولیه انجام شده و امکانسنجی میگردد.
برای ساخت مدل نیز از قالبگیری استفاده نمیشود؛ بلکه با کمک فرایند FDM بخشهای مختلف ربات بهصورت اتصالات نری و مادگی پرینت و به یکدیگر متصل میگردند و یا اتصال قطعات با کمک حلال PLA صورت میپذیرد. بعد از آن، سطوح، پرداخت و در نهایت رنگ میشوند که رنگکردن تنها مرحلهای از کار است که برونسپاری میگردد.
از چالشهای بخش ساخت در رباتها، میتوان به پروژکتور ربات تابان اشاره کرد. پروژکتور مورد نیاز باید تصویر با کیفیت خوبی را با بُرد دوطبقه ارایه میکرد. همچنین سنگینی و گشتاوری که این پروژکتور اعمال میکرد، از چالشهای دیگر آن بود. البته پروژکتورهای خوبی در دنیا وجود داشتند که دسترسی به آنها در ایران ممکن نبود. این محدودیت دسترسی برای اجزای دیگر ربات مانند موتورهای Dynamic cell که از کره وارد میشوند و هماکنون نیز تامین آنها مشکل است نیز وجود دارند.
قسمتهای الکترونیکی رباتها از طراحی بردها تا برنامهنویسی آنها، تماماً توسط دانشجوهای مکاترونیک خود آزمایشگاه انجام شده و میشود.
Ross یک سیستمعامل رباتیک است که همه حسگرها و اکچوئیتورها را مدیریت میکند. بهعبارتی یک بستر است که دادههای حسگرها و اکچوئیتورها در آن قرار گرفته و هر بخش از ربات متناسب با عملکرد و نیازش به این دادهها، از آنها استفاده و بهرهبرداری میکند.
بسته به کاربرد، یکی از انواع نرمافزار Ross، یعنی Ross 1، Ross 2، Ross Synetic، Ross Neumaticو Ross Melodic روی ربات پیادهسازی میگردد.
تمامی موتورها، حسگرها و اکچوئیتورهای ربات به پکیجهای این نرمافزار شناسانده میشوند که از حسگرهای رایج میتوان به حسگر دوربین و میکروفون اشاره کرد.
انواع دوربینهایی مثلrealsense ،cinect یا دوربین معمولی استفاده میشوند که حتی میتوانند لایهدار باشند و از کل محیط، اسکن دوبعدی انجام دهند که ربات آرش این قابلیت را داراست.
همچنین در رباتها معمولاً از آرایههای میکروفونی استفاده میگردد که قابلیت تشخیص جهت صدا نیز وجود داشته باشد. بسته به کاربرد، حسگرهای دیگری مانند حسگر لمس نیز در رباتها موجود هستند که برای مثال بتوانند در صورت برقرای تماس از سمت کودکان با خودشان، آن را تشخیص دهند.
استفاده از هوش مصنوعی در این قسمت از زمینههای تحقیقاتی بهروز است که از آن جمله می توان به تشخیص صحبتهای یک فرد با توجه به لبخوانی و به کمک هوش مصنوعی اشاره کرد.
مرحله سومِ کار، فاز بالینی پژوهش است که با هدف سنجش میزان اثربخشی فرایند و با کمک پرسشنامههایی که روانشناسان تهیه میکنند، توسط خود دانشجویان انجام میشود.
برای ورود به این فاز نیازمند آشنایی با ادبیات آن است که به ادبیات روش تحقیق نزدیک است. این فاز، دو روش دارد. در روش single subject design ، اثربخشی یک فناوری روی یک نفر مورد تحقیق و بررسی قرار می گیرد، از این فرد، تستهای متنوعی قبل و بعد از کار با فناوری به عمل میآید و این نتایج با هم مقایسه میشوند. پژوهشهای انجامشده روی بیماران طیف اوتیسم، همگی single subject بودند.
در حالت دیگری از مطالعات، از گروه کنترل و گروه مداخلهای استفاده میشود. بدین صورت که یک گروه با ربات و یک گروه بدون ربات مورد آزمایش قرار میگیرند و تفاوت عملکردها بررسی میشوند.
رباتهای ساختهشده در آزمایشگاه
اولین ربات، «آرش »۱ بود که در سال ۹۵ رونمایی شد. آرش ۱ به مرکز محک برده شد و در آنجا به کودکان، توضیحاتی درباره بیماریشان ارایه داد و به کاهش اضطراب آنها کمک کرد.
آرش، این توانایی را داشت که به کمک حسگرهای خود، اسکن دوبعدی از محیط تهیه کند و راه برود. بخشی از چالشهای این ربات و تحقیقاتی که روی آن صورت گرفت، مربوط به همین راهرفتن بود. آرش باید میتوانست زمانی که آدمهای دیگر در حال رفتوآمد هستند، مسیر خود را بهطور پویا عوض کند یا مثلاً برخی ملاحظات اجتماعی را رعایت کند. مانند اینکه زمانی که دو نفر با هم در حال صحبت هستند، مسیر خود را از بین این دو نفر تعیین نکند و آداب اجتماعی را رعایت نماید.
پس از موفقیت ربات آرش ۱، با حمایتی که از جانب معاونت علمی دریافت شد، ربات «آرش ۲» ساخته شد. آرش ۲ تکمیلشده آرش ۱ است که دو درجه آزادی به آن افزوده شده و رابط کاربری آن بهبود یافته و توانایی حرکت، صحبت و دریافت حرکات محیطی را دارد.
آرش ۲ متناسب با حسگرهایی که دارد، سناریونویسی شده و میتواند سناریوهای خاصی را اجرا کند؛ برای مثال این ربات تا به حال در چند همایش بهعنوان مجری حضور داشته و مجری برنامه کهربا در شبکه آموزش بوده است، بعد از آن یک ربات آرشِ مینی به نام «آرمین» ساخته شد که از نظر اقتصادی بهصرفهتر بود و در آن بهجای mini PC از Raspberry برای پردازنده مرکزی استفاده شد.
در ادامه، ربات «رسا ۱» ساخته شد که تنها شامل دو دست بود. این ربات، با ربات «رسا ۲» تکمیل شد و سایر المانها نیز به آن افزوده شدند. رسا، رباتی برای یادگیری و آموزش زبان اشاره است که میتواند حرکات زبان اشاره را کاملاً با انگشتهای دستش انجام دهد.
بعد از ساخت و رونمایی این ربات، سازندگان ایمیلی از آمریکا و از جانب یک دانشگاه با قدمت ۱۵۰ساله که مخصوص ناشنوایان بود، دریافت کردند. بعد از آن بود که آنها با بررسی اینکه در خاورمیانه چنین دانشگاهی وجود ندارد، به این فکر افتادند تا اولین دانشگاه ناشنوایان را با نام «فرشتگان» طراحی و تاسیس کنند و بهعبارتی بانی تأسیس این دانشگاه، ربات رسا بود!
پنجمین ربات، ربات «روما» است. یک ربات مانکن که ابعادی انسانی دارد و با استفاده از موتورهای Dynamic cell، میتواند فرمهای متفاوت به خود بگیرد و نحوه ایستادن لباس بر تن مانکن را در این حالتها نشان دهد. متاسفانه علیرغم هزینه پایینی که ساخت این ربات در آن زمان داشت، تجاریسازی نشد.
ربات روما
پس از آن، ربات «تابان ۱» و «تابان ۲» برای اهداف آموزشی ساخته شدند. تابان ۲، شش درجه آزادی دارد و از بین این رباتها تنها رباتی است که نمایشگر دارد. این نمایشگر روی سینه ربات جانمایی شده و در واقع مانند تخته سیاهی است که ربات میتواند برای مثال تمرینهای آموزشی خود را روی آن نشان دهد. صورت تابان ۲ یک پروژکتور است و از مزایای آن میتوان به سهبعدیبودن صورتش اشاره کرد. میتوان ماسکهای مختلفی را روی صورت تابان قرار داد و شخصیتهای متفاوتی مانند مینیون یک چشم، دو چشم و … را برایش پدید آورد. این ربات میتواند سه شخصیت دانشآموز، معلم و همکلاسی را داشته باشد؛ بهطوری که حتی کودک بتواند مطالبی را برای ربات توضیح و به او آموزش دهد.
ربات بعدی، ربات «مایا» ؛ رباتی فیلی شکل که برای کودکان سرطانی طراحی شده است. این ربات پنج درجه آزادی دارد و دارای دوربین، اسپیکر و میکروفون است. درون مایا یک mini PC قرار دارد، اما کنترل آن از بیرون صورت میپذیرد.
ربات آخر، ربات «آپو» است. آپو به شکل بطری آب طراحی شده و دو درجه آزادی دارد. برای پردازش از Raspberry کمک میگیرد و برای اهداف آموزشی، بهخصوص آموزش نحوه صحیح مصرف آب و انرژی ساخته شده است. از بین این رباتها، آرش و رسا قابلیت حرکت دارند و تابان، مایا، آرمین و آپو رومیزی هستند.
در حال حاضر، آزمایشگاه در حال تقویت این رباتها و همچنین توسعه فناوری واقعیت مجازی است. دلایل متعددی برای ضرورت توسعه فناوریهای واقعیت مجازی یا اپهای اندرویدی در کنار رباتهای اجتماعی وجود دارد.
یکی از این موارد، اقتصاد رباتهاست. بدیهی است که یک خانواده برای کودک خود یک ربات تهیه نخواهد کرد و در نهایت از هر ربات احتمالاً ۲۰ الی ۳۰ عدد در سراسر کشور در مراکز مربوطه عرضه میشوند. اما هزاران هزار اپ اندروید میتوانند در دست کودکان باشند. از دیگر مزایای آن، ارتباط مستمری است که برقرار میگردد. فرض کنید کودک یک بار ربات تابان را میبیند و پس از آن میتواند در خانه بارها با اپِ این ربات، بازی کند و ارتباط او برای آموزش با کمک ربات قطع نمیگردد. همچنین با این کار، کودک انگیزه دارد که دوباره به مرکز مربوطه مراجعه و با خودِ ربات نیز ارتباط برقرار کند. مورد دیگر نیز نگهداری و تعمیر این رباتهاست. یک ربات ممکن است بیش از حد داغ شود، یکی از اجزایش به هر دلیل از کار بیفتد و نیاز به تعمیر داشته باشد؛ اما اپهای اندرویدی چنین مشکلی را ندارند.



دیدگاهتان را بنویسید